Цепи управления
Для возможности управления главным электроприводом в системе ГД - МУ необходимо подать ток в цепи управления (независимые обмотки возбуждения генераторов и рабочих двигателей катушки контакторов, электромагнитов вентилей муфт и тормозов, токовые потенциометры и др.).
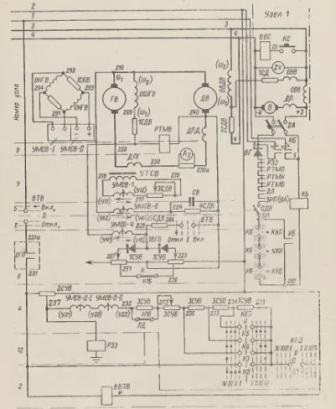
Питание незaвисимыми обмоткам возбуждения дви-гателей ОВД подается автоматически сразу же после пуска вспомогательного ,преобразовательного агрегата,так как а обмотки двигателей ОВД наглухо подключенны к якорю генератора возбудителя В (узел 1 на рис. 26).
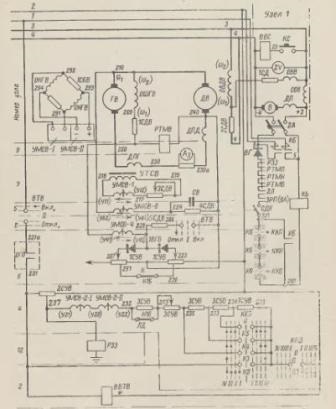
Подача питания на остальные цепи управления, в част-ности на токовые потенциометры, командоконтроллеры и т. д., может быть осуществлена только при включении автомата 2А и контактора блокировки КБ (узел 1).Последний включается при соблюдении следующих yc-ловий: постановка всех рукояток командоконтроллеров главных приводов (ККП, ККН и ККВ) в нулевые положения, наличие достаточного давления воздуха в пневмосистеме (что бы замкнуть контакт сиг- нализации дaвления СДК), включение в работу вентиляторов обдува двигателей подъема, напора и поворота и подача питания силовым маrнитным усилителям (для замыкания контакта реле 3РП) и, наконец, должен быть включен контактор 2Л, шунтирующий пусковые сопративления в пусковой цепи главного приводного двигателя.
Кроме того, в цепи контактора АБ установлен выпря-митель ВГ, разрешающий eго включение, если согла-сованы полярности возбудителя В со схемой подключе-ния выпрямителей в токовых отсечках (см. узлы 6 на рис. 24-26). При этом зажим 3 возбудителя должен иметь положительный потенциал, так как иначе ток возбудителя пройдет через выпрямители ВГ токовых потенциометров и это может вывести выпрямители из строя.При выполнении всех условий замыкается цепь питания катушки контактора КБ, который самоблокирует участок цепи, где включены контакты нулевых положений командоконтроллеров.
Благодаря этому можно. переводить рукоятки в рабочие положениякомандоконтроллеровприуправлении электроприводами. Автоматическое отключение контактора КБ происходит при срабатывании любого реле защиты : максимальной токовой защиты главных приводов в главной цепи РТМП, РТМН, РТМВ (см. узлы 9 на рис. 24-26) и реле защиты от замыкания на корпус РЗЗ (узел 12 на рис. 26).
Для управления определенным рабочим электродвигателем теперь необходимо включить соответствующий универсальный переключатель тормозов ВТП, ВТН или ВТВ главных приводов и тем самым растормозить paбочий механизм.
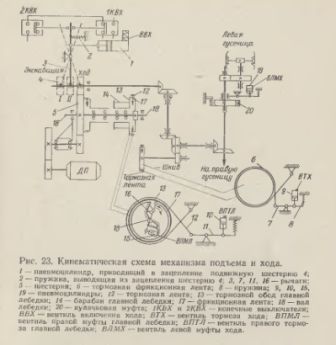
Узел управления тормозом (узел 2 на рис. 24-26).Для устранения возможности самопроизвольного pac -кручивания рабочего механизма при остановке электро-двигателя под действием внешних усилий, остаточных токов в якорных цепях или при аварийном снятии нaпряжения с питающей экскаватор линии каждый главный рабочий механизм снабжается автоматически действующим ленточным или колодочным пружинным тоp- мозом (см. рис. 23).
При подаче посредством выключателя тормозов ВТ питания на катушку электромагнита вентиля (ВУ, ВТХ,ВВТН, ВВТВ, узлы 2 на рис. 24-26) осуществляется растормаживание механизма (тормоз отключается).При отключении катушки электромагнита вентиля (ВУ, ВТХ, ВВТН, ВВТВ) тормоз «накладывается» на рабочий механизм (тормоз включается). Механическим тормозом обычно пользуются при длительных перерывах в работе.Во время же экскавации торможение привода оcyществляется электрически: рукоятку командоконтроллера КК переводят в нулевое или противоположное положение (реверсирование).Механические тормоза могут включаться автоматически при срабатывании реле защиты РТМ и РЗЗ или аварийном выключении напряжения, подаваемого на экскаватор.Таким образом, оперативное управление тормозом рабочего механизма осуществляется с помощью универсального переключателя ВТ ; при этом включается и отключается и задающая обмотка УMC2 усилителя (узел 4 на рис. 24-26). При включении задающей обмотки усилителя любым из электроприводов уже можно посредством командоконтроллера управлять.Исключение составляет привод подъема (см.ниже).
При различном рабочем оборудовании электромагнитные вентили ВМ и ВУ в схеме на рис. 24 (узел 2-3). служащие для вшлючения муфт тормозов главной лебедки, имеют различные назначения: ВМ: лопата правая муфта фрикцион подъема,драглайн правая муфта фрикцион подъема; кран левая муфта тормоз подъема; ВУ: лопата правая муфта тормоз подъема; драглайн левая муфта фрикцион тяги; кран левая муфта фрикцион подъема.
Узел Переключения с подъемной лебедки на ход и обратно (узел.23 на рис. 24).Прежде чем приступить к управлению электроприводом подъемной лебедки, Heоб-ходимо выбрать режимы работы: Экскавация грунта или передвижение экскаватора в соответствии с предстоящей работой. Это вызвано тем, что рабочий электротдвиrатсль подъема ДП является общим для механизмов передвижения экскаватора и подъемной лебедки (см. рис. 23). Поэтому он может работать только равновременно: как привод подъема при экскавации
или как привод передвижения экскаватора (для этого вклю-чается промежуточный контактор хода КПХ). Выбор того или иного режима (Хода или Экскавации ) оcyществляется на пульте управления переключением в coответствующее положение ручки универсального переключателя режимов 1 УП. Допустим, произведено переключение 1 УП (ручка повернута влево) на режим «Ход». В этом случае (рис.24 и 23) подается питание на электромагнит вентиля включения хода ВВХ, а следовательно, поступает сжатый воздух в пневмоцилиндр 1 (рис. 23). При подаче сжатоrо воздуха в пневмоцилиндр шток цилиндра передвигается влево и поворачивает рычаг 3 против часовой стрелки; вместе с ним он передвигает по шестерню 4. вводя ее в зацепление с ведущей шестерней 5.которая может приводиться в движение от электродви-гателя подъема ДП. Зацепление подвижной шестерни 4, как это видно из рис. 23, подключает всю кинематическую цепь механизма перемещения экскаватора к двигателю подъема ДП. Однако при производстве этих операций по подготовке к передвижению экскаватора механизм хода остается еще заторможенным ленточным тормозом 6 (рис. 23), потому что рычаг 7 повернут под деиствием оттягивающего усилия пружины 8 против часовой стрелки, так как пневмоцилиндр 9 соединен с атмосферой.Последнее достигается тем, что электромагнит вентиля тормоза хода (см. ВТХ в узле 23 на рис. 24) обесточен, так как пакетный выключатель тормоза ВТП еще не включен.Одновременно с зацепленпем шестерни 4 в результата те воздействия рычага 3 на конечный вьключатель 2КВХ в электрической схеме (узел 23 на рис. 24) ,производятся соответствующие переключения: подготавливаются цепь включения катушки промежуточного контактора хода КПХ. а также цепь включения электромагнита вентиля тормоза хода ВТХ.
Теперь уже при включении универсального переклю-чателя ВТП подается питание на вентиль ВТХ и pacтормаживается тормоз хода 6 (рис. 23). Одновременно включается промежуточный контактор хода КПХ, который замыкает свой замыкающий 'контакт в цепи задающей обмотки усилителя УМСП2 (см. узел 4 на рис24). Таким образом, электропривод передвижения готов к пуску. Если ручка переключателя режима работы lУП будет переведена в режим «Экскавация» (вправо), то катушка электромагнита вентиля включения хода ВВХ в результате этого обесточится (узел 23 на рис. 24).При отключении катушки ВВХ пневмоцилиндр 1 (рис. 23) соединяется с атмосферой. Тогда под действием сильной пружины 2 рычаг 3 вращается по часовой стрелке и выводит шестерню 4 из зацепления с шестерней 5. Одновременно рычаг 3 воздействует на конечные вьключатели 1КВХ и 2КВХ. При этом замыкающий контакт 2КВХ и размыкающий контакт 1 КВХ конечных выключателей разрывают цепи промежуточного контактора хода КПХ и электромагнита вентиля тормоза хода BТX, а замыкающий контакт конечного выключателя 1КВХ, замыкаясь, подготавливает цепь подачи питания на задающую обмотку усилителя УMC2. В результате этих действий экскаватор готов к черпанию грунта, так как остается лишь включить универсальный переключатель тормозов ВТП. Включение последнего приводит к подаче ,питания на электромагнит вентиля тормоза подъемного механизма ВJI ('см. узел 23 на рис. 24),а следовательно, тем самым растормаживается (главная) лебедка (см. 12 на рис. 23). Однавременно, как и во всех остальных приводах, включается задающая об-матка усилителя УМСП2, т. е. электраприводом уже можно управлять посредством командоконтроллера ККП.
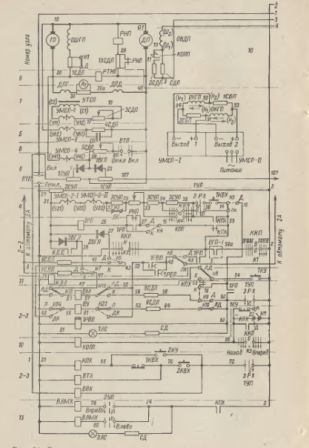
Узел задающей обмотки управления магнитного ycи-лителя (узел 4 на рис. 24-26). Сигнал для пуска рабочего двигателя подается командоконтроллерам КК, который изменяет как величину, так и направление тока в задающей обмотке усилителя УMC2. Направлением и величиной тока в задающей обмотке, как известно, опре -деляются направление и величина напряжения генератора и следовательно направление и частота вращения двигателя.
Задающая обмотка УMC2 включена через добавочный резистор (задающий потенциометр) 3СУ на потенциометр 2СУ, питающийся от якоря возбудителя напряжением 11О В.
В схемах подъема (рис. 24) и напора (рис. 25) используются три положения командоконтроллера, что соответствует трем ступеням частоты вращения двига -теля при прямом и обратном направлениях его вращения.
В схеме поворота (рис. 26) применяются четыре ступени частоты вращения электродвигателя. Увеличение частоты вращения рабочих двигателей достигается шунтированием части добавочного резистора 3СУ контактами командоконтроллера.Напряжение генератора в переходных и установившемся процессах, как известно, определяется взаимодействием обмоток усилителя задающей УMC2. об -мотки напряжения УМСб, токовой УMC4 и стабилизизирующих обмоток по напряжению генератора УМСб и по току главной цепи УMC1.
Узел отрицательной жесткой обратной связи и стаблизации по напряжению генератора (узел 5 на рис. 24-26).Обмотка отрицательной жесткой обратной связи по напряжению генератора УМСб, подключенная через добавочный резистор 4СД (4СДП, 4СДН, 4СДВ),создает н. с., пропорциональную напряжению на якарь генератора, которая является размагничевающей по отношению к задающей обмотке. Одновременно обмотка усилителя УMC6 выполняет функции гибкой обратной связи по напряжению генератора благодаря наличию в ее цепи конденсатора С (Сп. СН. СВ на рис. 24-26) Узел отрицательной обратной связи по току главной цепи с отсечкой (узел 6 па рис. 24-26). Отрицательная обратная связь по току (обмотка УMC4) предназначена, как известно, для ограничения тока двигателя как в статических режима при работе двнгателя на упор так и в динамических режимах при пусках и торможениях электропривода.
Полярность токовой обмотки принимается такой, что ее н. с. направлена против н.с., задающей обмотки УMC2, т. е. При повышении тока в главной цепи сверх значения, начинает действовать токовая обмотка ,и происходит понижение нaпряжения генератора.
Токовые потенциометры lСУ всех трех приводов coe-динены последовательно и включены через контакты кон-тактора подачи питания КБ на напряжение 110 В.
Узел стабилизации по току главной цепи (узел 7 на рис. 24-26). Для создания сигнала,пропорционального
интенсивности изменения тока в главной цепи, используется дополнительная обмока УМС, намотанная на дополнительные полюсы генератора. К этой обмотке через резистор 3СД (3СДП, 3СДВ. 3СДН) подключается обмотка управления Силового магнитного усилителя УMC1. Полярность обмотки выбирается при наладке такой, чтобы при возрастании тока в главной цепи снижалось напряжение генератора. В результате этоrо сглаживаются толчки тока, что благоприятно сказывается на работе механической части экскаватора в динамическом режиме работы электропривода.
Узел гашения остаточного магнетизма (узел 8 на рис. 2426).При отключении электропривода вручную посредством универсальноrо выключателя ВТ снимается питание задающей обмотки усилителя и катушки электромагнита тормоза., последняя включает (накладывает) механический тормоз: двигатель мгновенно стопорится. Если при этом недостаточно быстро уменьшается остаточное напряжение генератора из-за слабого размагничивающегo действия обмотки напряжения усилителя УMC6, то возможно возникновение значительноrо тока в цепи якоря двигателя. Этот ток создает опасность перегрева обмоток и подгорания коллекторных пластин. Для предупреждения таких явлений и предусматривается дoполнительное гашение остаточного магнетизма путем подключения токоограничивающей обмотки УMC4 Hепосредственно на дополнительные полюсы ДПГ ДПД, минуя потенциометр сравнения 1СУ. Это подключение осуществляется замыканием контакта универсального выключателя ВТ в цепи резистора 5СД. При этом в усилителе начинает действовать размагничивающая н. с.токовой обмотки УMC4, совпадающая с н. с. обмотки напряжения УМСб, значительно ускоряя этим размагничивание усилителя и генератора.
Узел защиты (узел 9 на рис. 24-26). В случае обрыва узла токовой обмотки УMC4 появляется опасность возникновения больших толчков тока в главной цепи, могущих значительно превысить предельно допустимые значения тока , что приводит к появлению недопустимых усилий в механической части экскаватора. Во избежание подобных явлений в схеме управления главными электроприводами и предусмотрено реле максимального тока РТМ, включенное на падение напряжения в сопротивлениях дополнительных полюсов ДПГ и ДПД.
Реле срабатывает, если ток в главной цепи становится больше максимально допустимой величины (свыше 25% стопорного тока). При этом размыкается кон-такт реле РТМ в цепи катушки контакта КБ (см. узел 1),который отключает цепи управления всех приводов от возбудителя. В результате этоrо происходит гашение поля генератора и включение механических тормозов.

Узел возбуждения и ослабления поля двигателя (узел 10 на рис. 24-25). Независимые обмотки возбуждения поля двигателей ОВД всех приводов подключаются через добавочные резисторы СД к источнику их питания - возбудителю В (рис. 26, узел 1).у приводов подъема (рис. 24) и напора (рис. 25) параллельно этому добавочному сопротивлению контактами контактора ослабления поля КОП подключается шунтирующий eгo резистор 2СДП (2СДН). При этом общее сопротивление в цепи обмотки возбуждения ОВД уменьшается, а ток возбуждения возрастает. Этот ток и соответствующее ему поле возбуждения двигателя являются для этих приводов н о м и н а л ь н ы м и, так как при таком поле возбуждения и на минимальном напряжении на зажиме якоря генератора двигатель развивает номинальную частоту вращения (750 об/мин двигатель подъема и 1200 об/мин двигатель напора).
В случае необходимости в этих приводах дальнейшего увеличения скорости 'вращения (сверх номинальной) производится ослабление поля возбуждения двигателя отключением сопротивлений 2СДП (2СДН) при выключении контактора ослабления поля КОП. Она происходит в приводе подъема при постановке рукоятки командоконтроллера в IV положение «Назад» (при спуске ковша). При этом скорость увеличивается до 1500 об/мин,что уменьшает время опускания ковша после разrрузки.
В приводе напора ослабление происходит при постановке рукоятки командоконтроллера в IV положение «Назад» (при возврате рукояти из забоя). При этом скорость увеличивается до 1900 об/мин.
Узел управления приводом открывания днища ков-
ша (узел 11 на рис. 24).Для разгрузки наполненного ковша при экскавации в рукоятке командоконтроллера имеется рычаг (см. 1КУ в узле 11), при нажатии котоpoго возбуждается катушка контактора управления двигателем открывания днища ковша КДД. Включение контактора КДД приводит к включению двигателя и вращению эксцентрика, который, перемещая связанную с ним тягу, открывает днище ковша.
Узел защиты от замыкания на землю (узел 12 на рис. 26). Появление двойных замыканий на корпус в цепях управления может привести к ложной рабате отдельных узлов схемы. Во избежание этих явлений предусматрена в приводе поворота реле напряжения РЗЗ, включеннае между делителем напряжения потенциометром 3СУ и землей (корпусам экскаватора). При появлении где-либо «второй земли» в цепях схемы управления реле РЗЗ срабатывает. Включается звуковай сигнал и выключается контактор КБ, отключающий цепи управления.
| 



