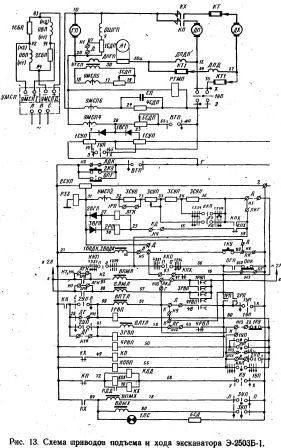
привод подъема
Для черпания грунта
(подъема ковша) машинист включает переключатель режимов рабаты 1 УП в положение «Экскавация», В peзультате чего из за снятия напряжения с катушки электромаrнита вентиля ВВХ подвижная шестерня ) выхадит из зацеплепления с Beдущей шестерней 5. При этам в узле 23 (рис. 24) замыкающий контакт 2КВХ закрывается, а размыкающий контакт 1 КВХ канечноrо выключателя размыкается, разрывая тем самым цепи промежуточноrо контакта хода КПХ и электромагнита вентиля тормоза хода ВТХ. На механизм передвижения накладывается тормоз. Другой же контакт конечного выключателя 1 КВХ ( замыкающий ) тем временем подrотавливает цепь подачи питания на задающую обмотку УМСП 2 (узел 4 на рис. 24).Одновременно с этим при переводе ключа 1УП в peжим «Экскавация» один из erо контактов включает цепь электромагнита вентиля 'праваrо тормоза главной лебедки ВУ (узел 23 на рис. 24)
а следовательно, этим подает воздух в пневмоцилиндр 10 (рис. 23). Поршень цилиндра, перемещаемый сжатым воздухом поворачивает рычаг 11 па часовой стрелке, и нормально замкнутый ленточный тормоз 12 размыкается (разжимается), отходя от внешней поверхности фрикционноrо барабана 13, с которым жестко скреплен правый (подъемный) барабан 14. Таким образом, барабан паодъемной лебедки растормаживается. Одновременно включается реле времени 1 РВП (узел 23 на р.ис. 24), которое двумя параллельно соединенными контактами с выдержкой времени при размыкании 1 РВП включает цепь электромагнита вентиля правой муфты главной лебедки ВМ. Включение муфты приводит к подаче сжатоrо воздуха в пневмоцилиндр 15 (рис. 23). При этом шток, выдвигаясь из цилиндра, поворачивает по часовой стрелке pычаг 16, который своим верхним концом перемещает подвижнай конец фрикционной ленты 17 и, таким образом, прижимает ленту к внутренней поверхности фрикционного барабана 13. Поскольку ведущий конец ленты присоединен к валу главной лебедки 18. создается фрик-ционное сцепление вала 18 с подъемным барабанам 14, т. е. муфта включается. В результате этай операции барабан подъемной лебедки 14 оказывается жестко связанным с валом главной лебедки 18, а через него с приводным электродвигателем. Другим замыкающим контактом переключатель peжимов 1 УП подготавливает цепь подачи питания на задающую обмотку управления усилителя УМСП2 (рис. 24). При нулевом положении командоконтроллера КК напряжение генератора равно нулю. В этом положении КК включается контактор ослабления поля КОПП (узел 10 на рис. 24). В цепи возбуждения двиrателя подъема устанавливается номинальный ток («полное поле»).
Подъем ковша.
При переводе рукоятки командоконтроллера КК из положения О в одно из рабочих положений (допустим, полная скорость 4 «Вперед») замыкаются контакты командоконтроллера K1-K5 и подается полное питание на задающую обмотку УМСП2 силового магнитного усилителя. В результате этоrо н. с. задающей обмотки усилителя будет равна максимальному значению F3 и один из усилителей, допустим УМСП l двухтактного блока ПДД1,1 В, полностью намагничивается (насыщается). Одновременно другой (УМСПII) полностью размагничивается. Следовательно ток выхода усилителя УМСП l станет максимальным, а УМСП II минимальным. По полуобмоткам независимоrо возбуждения ОНГП генератор (рис. 24) пройдет ток возбуждения определенноrо направления и спустя некоторое время примет максимальное значение, форсируя возбуждение reнepaтора ГП. На этой начальной стадии процесса пуска быстро по-вышается напряжение на зажимах генератора и ток якоря двиrателя, а следовательно, и ,соответствующие н. с. обмоток усилителя: напряжения УМСП6 , токоограничивающей УМСП 4 , токовой стабилизации УМСП l и стабилизации по напряжению УМСП6.
Намагничивающая сила обмотки УСМП6 магнитногo усилителя, хотя она и будет увеличиваться по мере роста напряжения генератора, не уменьшает результирующую ,толькo концу разrона эффективность этой обмотки возрастает и она снимает форсировку возбуждения генераторов в установившемся режиме.
В результате быстроrо нарастания тока якоря двигателя последний разгоняется, а с ним и рабочий мexaнизм, в сторону, соответствующую подъему ковша. Броски тока в якорной цепи при разгоне двигателя до основной скорости оrраничиваются при помощи токовой обмотки УМСП4 усилителя. Происходит это следующим образом. Как только ток в главной цепи увеличится выше допустимоrо значения (например, при чрезмерно быстром росте напряженияг енератора или же по иной причине), вступит в действие токовая отсечка, т. е. падение напряжения на участке 20-40 (см. рис. 24)главной цепи становится больше напряжения сравнениясоответствующего участка (7 -40 или 40-23) потенциометра lСУП. Тоrда по токоограничивающей обмотке УМСП4 пройдет ток и ее н. с. р т станет действовать против н. с. F з ; магнитный усилитель начнет резко раз-магничиваться, и токовая отсечка прекратит свое действие. Подобным образом токоограничивающая обмотка УМСП4 усилителя на протяжении вcero периода разгона ограничивает ток в главной цепи, осуществляя отсечку в зависимости от тока якоря, и тем самым наилучшим образом формирует токовую характеристику главной цепи. При переводе рукояти командоконтроллера из нулевого в первое или второе положение «вперед»ь .В работе схемы по сравнению с третьим положением заключается лишь в различных величинах задающего тока и, следовательно, в различных величинах установившегося напряжения генератора и частоты вращения двигателя. Независимо от положения командоконтроллера КК двигатель на протяжении всего процесса подъема paботает при полном поле. Уменьшение скорости подъема ковша достигается переводом рукоятки ККП из крайнеrо положения в oдно из промежуточных положений. При этом уменьшается напряжение генератора , а скорость двигателя в первый момент остается неизменной, и тоrда становится больше э. д. с. генератора. С этоrо момента токт в цепи якорей ГП и ДП изменяет свое направление и в двигателе создается электрический тормозящий момент, т. е. осуществляется рекуперативное торможение При этом н. с. токовой обмотки УМСП-4 также изменяет свой знак и стремится ограничить броски динамической составляющей тоpмозноrо тока в якорной цепи путем подмагничивания гe-нератора, увеличивая ero напряжение. По мере торможения привода уменьшаются э. д. с. двигателя и тормозной ток. Двигатель вновь переходит в двигательный режим на Промежуточную характеристику, определяемую новым положением командоконтроллера ККП.
При переводе рукоятки командоконтроллера КК из любоrо положения подъема в нулевое тоже происходит торможение привода. При этом двиrатель, как и раньше, переходит в генераторный режим и отдает вырабатываемую энергию генератору. Величина тормозного тока, как , и прежде, ограничивается токовым узлом. Величина предельноrо тока при динамическом торможении в генераторном режиме получается меньшей, чем в двигательном режиме. Объясняется это тем, что для тогo чтобы ток в главной цепи не превышал в двигательном режиме предельноrо (стопорного) значения, н. с. Токовой обмотки при стопорном токе должна быть равна н. с. задающей обмотки. Реверсирование двигателя осуществляется переводом рукояти командоконтроллера ККП Из положения «Вперед» в положение «Назад».
При этом размыкаются контакты Kl, и замыкаются контакты К2 командонтроллера ККП (а также K3 и K5) и изменяется полярность напряжения на зажимах задающей обмотки усилителя. Вследствие этоrо генератор интенсивно размагничивается, и после уменьшения нaпряжения возбуждения генератора до нуля он так же интенсивно наманничивается в противоположном нaправлении, Т. е. изменяется полярность напряжения гeнератора.
Одновременно с уменьшением напряжения генератора и при сохранении ;двигателем направления вращения неизменным полярность па зажимах главных машин (двигатель - генератор) не изменяется. Поэтому н. с обмотки напряжения УМС 6 по направлению совпадает с н. с. задающей обмоткой УМСП2, что приводит к еще более интенсивному размагничиванию генератора. Однaко ток в силовой цепи при переходе из двигательноrо режима в режим противовключения меняет свое направление, что приводит к изменению направления н. с. то-ковой обмотки УМСП4, которая своим действием не только компенсирует н. с. двух обмоток (задающей и напряжения), но и создает Н. с., достаточную для создания Э. д. с. в rгенераторе, направленную навстречу напряжению двигателя, ограничивая тем самым величину тормозноrо тока. Напряжение генератор, перейдя через нулевое значение, начинает возрастать в противоположном направлении до номинальноrо. Двигатель также начинает разгоняться в противоположном направлении.
Спуск ковша
Спуск ковша. При спуске порожнеrо ковша требуется небольшой вращающий момент двигателя и, кроме Toгo, желательно увеличить скорость опускания, чтобы сократить время холостых движений после разгрузки и тем самым увеличить производительность экскаватора. Это достигается ослаблением (уменьшением) поля возбуждения двигателя. Ослабление поля возбуждения двигателя подъема осуществляется автоматически при переводе рукоятки ККП в положение 4 «Назад» (от себя). В этом случае контакт К3 командоконтроллера ККП разрывает цепь катушки контактора ослабления поля КОП П (узел 10). Последний размыкает свой за мыкающий контакт КОПП в цепи обмотки возбуждения двигателя ОВДП (узел 10). В результате этоrо в цепь возбуждения днигателя вводится дополнительное сопротивление, уменьшающее ток возбуждения и ослабляющее поле двиrателя; частота вращения двигателя увеличивается при положении 4 КК с установленноrо при полном токе возбуждения значения (7500 - 100 об/мин) до максимальноrо, paвoro 1 500 -1 750 об/мин.
Действие данной системы во время торможения и peверсирования двигателя при спуске ковша происходит аналогично тому, что было рассмотрено для подъема ковша.
Режим регулирования.
Схемой привода подъема хода предусмотрена возможность реверсивного управления двигателем ДП и ero работы на всех возможных скоростях при отключенных рабочих механизмах (передвижения и lподъемноrо барабана), т. е. в режиме холоcтoгo хода.Работа двигателя ДП в случае, коrда все механизмы отключены, обеспечивается постановкой Переключателя режимов работы 1 У П в среднее положение, соответсвующее режиму (узел 4 на рис. 24) . Включение универ сальноrо выключателя тормозов ВТП приводит к подаче питанияв цепи только задающей обмотки усилителя (узел 4), а электромагниты фрикциона ВМ и тормоза ВУ, а также хода шестерни ВВХ остаются отключенными. Следовательно, :подъемный барабан расцеплен с вaлом главной лебедки и заторможен. Заторможен также механизм передвижения. Однако управление двигате-лем ДП посредством командоконтроллера подъема xoда возможно.
Управление передвижением экскаватора
В кинематической схеме экскаватора при Переходе с режима «экскавация» на режим работы «передвижение» должны произойти следующие изменения (рис. 23): ведомая подвижная шестерня 4 хода, бывшая при экскавации вне зацепления с ведущей шестерней 5, должна войти в зацепление с нею; подъемный барабан rлавной лебедки 14 отсоединен от двигателя и заторможен; снят механический тормоз 6 с механизма передвижения. Для осуществления этих изменений в кинематической цепи экскаватора необходимо переключатель режимов работы lУП (рис. 24) Перевести из положения «экскавация» в положение «ход». В результате этоrо шестерня 4 (рис. 23) кинематическай цепи механизма передвижения входит в зацепление с ведущей шестерней 5, связанной с двигателем ДП. Включение подвижной шестерни приведет ( посредством . конечных выключателей 1КВХ и 2КВХ) к включению вентиля ВТХ и контактора КПХ (узел 23 на рис. 24). О включении последнего сигнализирует лампа 2ЛС (узел 13 на рис. 24). При этом во избежание вращения падъемного барабана под тяжестью ковша во время наложения тормоза (в результате размыкания цепи вентиля тормоза лебедки ВУ размыкающим контактам переключателя lУП) барабан временно остается в зацеплении с валом главной лебедки, так как вентиль фрикциона ВМ (узел 2 - 3 на рис. 24) отключается размыкающими контактами реле времени 1РВП с выдержкой времени 3 сек. При отсутствии реле времени 1 РВП (или же малой erо выдержке) Произошла бы одновременное отключение катушек тормоза лебедки ВУ и фрикциона ВМ. Тогда имело бы место свободное падение кавша, поскольку время отключения фрикциона ВМ меньше, чем время наложения тормоза. Если подвижная шестерня при переключении пере-ключателя 1 УП в положение «Ход» не войдет в зацепление с ведущей шестерней и займет промежуточное положение 11, показанное на рис. 23, то нажимают на кнопку «Толчок хода» 2КУ (узел 23 на рас. 24) и одновременно перемещают рукоятку камандоконтроллера. В результате медленноrо вращения двиrателя ДП (рис.23) ведущая шестерня 5 поворачивается и подвижная шестерня 4 входит в зацепление с нею. При полном зацеплении шестерни хода горит сигнальная лампа хода «2ЛС» при отпущенной кнопке «Толчок хода». Экскаватор готов к передвижению поскольку одновременно с этим снимается механический тормоз с механизма передвижения. Действительно, при этом включается замыкающий контакт конечноrо вык-лючателя 2КВХ (узел 23 на рис. 24) и получает питание катушка электромагнитноrо вентиля тормоза хода ВТХ, который приводит к растормаживанию ленточным тормозом 6 (рис. 23) тормозного шкива механизма перевижения.
Управление двигателем в режиме хода
осуществляется соответствующим переключателем командоконтроллера подъема хода. Причем на всех ступенях двигатель работает с номинальным полем возбуждения,так как замыкающий контакт КПХ шунтирует контакт 1 командоконтроллера (см. узел 10 на рис. 24), который управляет контактором ослабления поля КОПП. Обычно командоконтроллер включен таким образом, что. при наклоне рукоятки КК «от себя» осуществляется передвижение 'Вперед 'в сторону натяжных колес экс-каватора, а при наклоне рукоятки КК «на себя» в обратную сторону (в сторону ведущих колес). Для разворота экскаватора переключатель 2УП «разворот гусениц» на пульте управления ставится в положение «влево» или «вправо» по усмотрению машиниста. При этом (см. узел 13 на рис. 24) включается вен-тиль левой или правой муфты (ВЛМХ или ВПМХ), что приводит к подаче сжатого воздуха в соответствующий Пневмоцилиндр 19 (рис. 23), и шток цилиндра отключает кулачковую муфту 20. Эта гусеница отключается и стопорится, а с помощью командоконтроллера подъема - хода производится управление разворотом экскаватора (вращением другой гусеницы).
| 



